
Presse
-
16. Mai 2019: Pressemitteilung zum Projektabschluss
Das Projekt Hy-Nets konnte erfolgreich abgeschlossen werden. Eine Pressemitteling mit Details zum Abschluss ist hier verfügbar.
-
8. Mai 2019: Demonstrations-Video des Projekts veröffentlicht
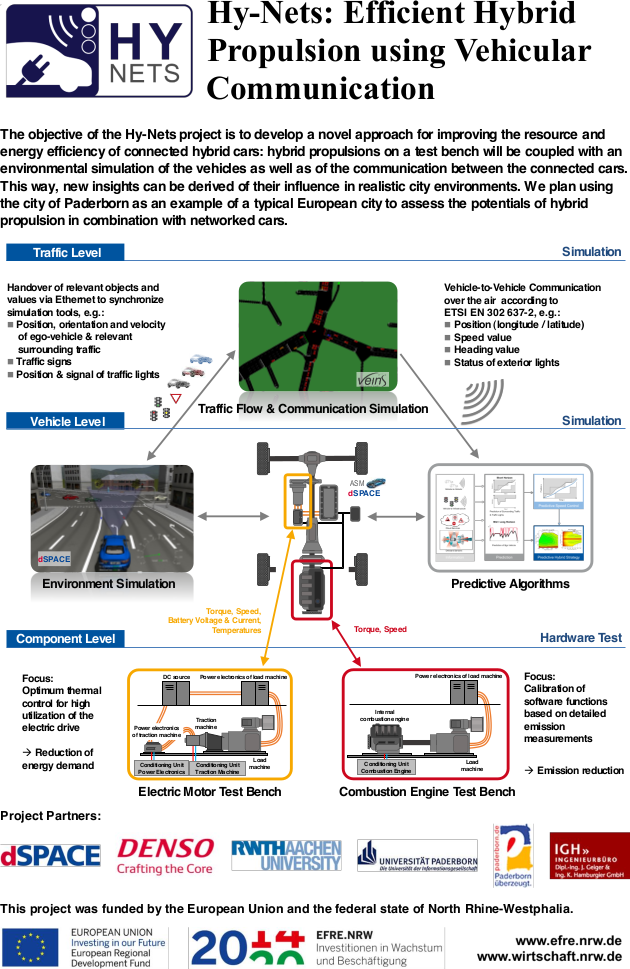
Zur Demonstration der im Projekt entwickelten Simulationsumgebung wurde dieses Video zusammengestellt. Es zeigt die involvierten Komponenten: Verkehrs- und Kommunikationssimulation (Veins), Ego-Fahrzeug- und Umfeldsimulation (ASM), optimierte Fahrzeugführung (Controllers) und die beiden Motoren des Hybridantriebs (ICE und EM Testbench).
Details zum Aufbau finden Sie in der folgenden Kurzübersicht (auch als PDF in höherer Auflösung verfügbar).
-
30. Januar 2019: Projektabschlusstreffen in Paderborn

Projektabschlusstreffen in Paderborn: Projektpartner treffen sich bei der dSPACE GmbH.
-
10. April 2018: Projekttreffen in Paderborn

Gesamtprojekttreffen in Paderborn: Projektpartner treffen sich am Heinz Nixdorf Institut der Universität Paderborn.
-
6. Februar 2018: Simulatorkopplung auf WONS 2018 demonstriert
Ein Zwischenergebnis in der Entwicklung der Simulatorkopplung wurde auf der WONS 2018 vorgestellt. Die zugehörige Publikation steht auf unserer Publikations-Seite zur Verfügung.
-
5. Oktober 2017: Projekttreffen in Aachen
Gesamtprojekttreffen in Aachen: Projektpartner treffen sich an der RWTH Aachen.
-
22. Mai 2017: Projektvorstellung auf dem 16. Wirtschaftstag durch DENSO
Am 22. Mai hat in Düsseldorf der 16. Wirtschaftstag getagt. Diese Veranstaltung ist Teil des jährlichen Japan-Tags, der viele Menschen aus der Region anzieht. Die DENSO AUTOMOTIVE Deutschland GmbH hat, neben anderen deutsch-japanischen Unternehmen, hieran mit einem Vortrag teilgenommen, der die gute Zusammenarbeit von lokalen Partner aus der Region NRW hervorhebt. Herr Kenzo Yano, Geschäftsführer von DENSO in Deutschland, stellte vor ca. 200 Teilnehmer die Firma DENSO als Technologieunternehmen näher vor und erläuterte hierbei in seinem Vortrag die Forschungsaktivitäten von DENSO in NRW. Das HY-NETS -Projekt, woran das Aachen Engineering Center in Wegberg teilnimmt, wurde hierbei als Leuchtturmprojekt für die gute Zusammenarbeit von verschiedenen Partner der Industrie, Forschung und Lehre im Rahmen des Leitthemas "Innovation durch Kooperation - neue Erfolgsstrategien fur Unternehmen in der digitalisierten und globalisierten Wirtschaft" vorgestellt.

DENSO stellt hierbei einen effizienten Hybridantrieb bei, der im Prüffeld mit einer Umgebung zur Simulation des Fahrzeugs, des Fahrzeugumfelds, des Verkehrsflusses und der Fahrzeugkommunikation gekoppelt wird. Ziel ist es die Auswirkungen realistischer, vernetzter Verkehrsszenarien, am Beispiel der Stadt Paderborn, mit Hilfe eines realen Hybridantrieb zu messen, um die Interaktion mit der Umwelt in Bezug auf Energieverbrauch und Auslastung der Verkehrsinfrastruktur zu bewerten. Der Vortrag wurde von den Teilnehmer des Wirtschaftstages mit grossen Interesse verfolgt und positiv bewertet.
-
28. März 2017: Projekttreffen in Wegberg

Gesamtprojekttreffen in Wegberg: Projektpartner treffen sich bei Denso.
-
30. November 2016: Artikel im dSPACE Magazin: Low Emissions dank Hy-Nets
Ein neuer Bericht zum Thema Hy-Nets ist im dSPACE Magazin 2/2016 erschienen.
-
8. November 2016: Projekttreffen in Paderborn
Gesamtprojekttreffen in Paderborn: Projektpartner und Verteter der Stadt Paderborn trafen sich bei der dSPACE GmbH.
-
8. November 2016: Vorstellung einer Masterarbeit
Im Rahmen des Treffens wurde weiterhin die Masterarbeit von Max Tacke vorgestellt.
Einbindung von Geodaten in eine Umfeldsimulation zum Testen von prädiktiven und automatisierten Fahrfunktionen
Vor dem Hintergrund einer steigenden Komplexität im Bereich der Fahrerassistenzsysteme ist es erforderlich, neu entwickelte Funktionen möglichst früh in dem Entwicklungsprozess in einem realistischem Fahrzeugumfeld reproduzierbar zu testen. Der Aufbau der hierfür benötigten geospezifischen Umfeldsimulation ist ein aufwändiger Prozess, bei dem die Integration der Geodaten zurzeit größtenteils manuell durch den Entwickler erfolgt. Die benötigte Testtiefe aufgrund der Komplexität von Fahrerassistenzsystemen verstärkt das Problem.
Daher wurde im Rahmen dieser Masterarbeit in Kooperation mit dem Unternehmen dSPACE in einem ersten Schritt die zur automatisierten Erstellung einer Simulationsumgebung benötigten Softwarewerkzeuge erweitert. Anschließend wurde eine Referenzstrecke definiert, für die relevante geospezifische Merkmale, wie zum Beispiel Straßenverläufe mit Höhenprofil und Lichtsignalanalagen, aus Datenbanken extrahiert und in den Aufbau der Simulation integriert wurden. In einem weiteren Schritt wurden mit einem Demonstratorfahrzeug Referenzmessungen für diese Strecke aufgenommen. Diese Fahrzeug- und Sensordaten wurden in die Simulation integriert, um andere Verkehrsteilnehmer darzustellen. Abschließend wurde der Prozess zur Erstellung der Simulationsumgebung validiert und für das Ego-Fahrzeug eine prädiktive und automatisierte Fahrfunktion zur Steigerung der Energieeffizienz entwickelt und untersucht. Somit ermöglicht das Vorgehen realitätsnahe Tests zur objektiven Bewertung prädiktiver und automatisierter Fahrfunktionen.
Betreuer: Markus Eisenbarth M. Sc. und Dipl.-Ing. Thorsten Plum, Prüfer: Prof. Dr.-Ing Jakob Andert und Dr.-Ing. Marco Günther
-
21. Juni 2016: Pressemappe zum Projekt-Kick-off veröffentlicht
Mit Car2X-Kommunikation zu effizienteren Hybridantrieben: EU- und NRW-gefördertes Forschungsprojekt nimmt die Arbeit auf.