
Press
-
16. May 2019: Project finish press statement released
The Hy-Nets project was succesfully concluded. A detailed press statement is available here.
-
8. May 2019: Project demonstration video released
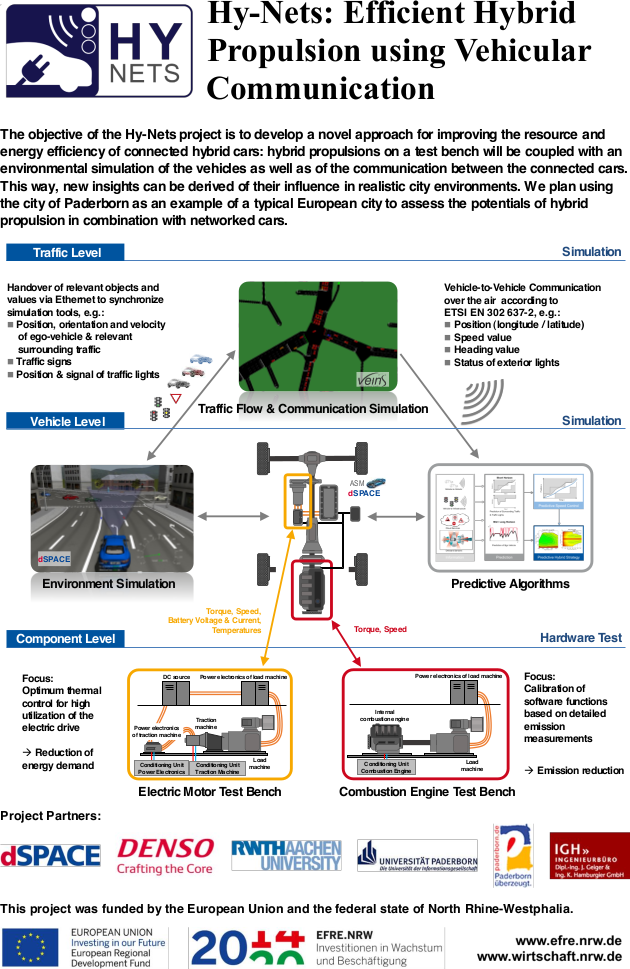
This video shows the connected simulation environment developed in the project. It displays the involved simulation components: traffic and communication simulation (Veins), ego-vehicle and environment simulation (ASM), optimized driving functions (Controllers), and the two engines of the hybrid drive train (ICE and EM testbench).
Details about the simulation environment can be found in the following overview (also available as a PDF with higher resolution).
-
30. January 2019: Final project meeting in Paderborn

Final project meeting in Paderborn: project partners meet at dSPACE GmbH.
-
10. April 2018: Project meeting in Paderborn

Full project meeting in Paderborn: project parters meet at the Heinz Nixdorf Institute of Paderborn University.
-
6. February 2018: Simulator coupling demonstrated at WONS 2018
Intermediate results of the simulator coupling were presented at WONS 2018. The accompanying publication is available from our publications page.
-
5. October 2017: Project meeting in Aachen
Full project meeting in Aachen: project parters meet at RWTH Aachen University.
-
22. May 2017: Project presentation on the 16th Wirtschaftstag by DENSO
DENSO, Mr. Yano, Head of European Technical Center and Aachen Engineering Center joined the so-called "Wirtschaftstag". The event, which was linked to the "Japan-Tag" in Duesseldorf had following title: "Innovation durch Kooperation - neue Erfolgsstrategien fur Unternehmen in der digitalisierten und globalisierten Wirtschaft".

About 200 persons attended this event. Mr. Yano presented DENSO's R&D activities in Europe, amongst others the HY-NETS project. During the panel discussion Mr. Yano got positive feedback on this activity, which was apparently appreciated by the audience.
-
28 March 2017: Project meeting in Wegberg

Full project meeting in Wegberg: project parters meet at Denso.
-
30 November 2016: New article in the dSPACE Magazine: Low Emissions with Hy-Nets
A new article was published in the 2/2016 issue of the dSPACE Magazine.
-
8 November 2016: Project meeting in Paderborn
Full project meeting in Paderborn: project parters and representatives of the city of paderborn meet at dSPACE GmbH.
-
8 November 2016: Presentation of a master's thesis.
During the project meeting, Max Tacke presented his master's thesis.
Integration of geodata into an environment simulation for the testing of predictive and automated driving functions (Einbindung von Geodaten in eine Umfeldsimulation zum Testen von prädiktiven und automatisierten Fahrfunktionen)
Concerning the rising complexity in the area of driver assistant systems, it is necessary to reproducibly test newly developed functions in a realistic car environment as early as possible. The construction of the geo-specific environment simulation, which is needed for this purpose, is a complex process, during which the integration of geo-data is mostly done by hand by the developers. Due to the complexity of the driver assistant systems, the needed test depth adds to the problem.
Therefore, as a first step, the software tools, which are needed for an automatized modelling of a simulation environment, were expanded within this Master’s Thesis and in cooperation with the company dSpace. Thereafter, a reference route was defined for relevant geo-specific features, such as road routing with an elevation profile and traffic lights. It was extracted from databases and integrated into the simulation configuration. In a next step, reference measurements for this route were recorded with a demonstrator vehicle. These vehicle and sensor data were integrated into the simulation to depict other road users. Finally, the process to generate the simulation environment was validated, and a predicative and automatized driving function was developed and examined to increase the energy efficiency of the Ego-vehicle. Thus, the execution of realistic tests enables an objective evaluation of predictive and automatized driving functions.
Supervisors: Markus Eisenbarth M. Sc. and Dipl.-Ing. Thorsten Plum, Correctors: Prof. Dr.-Ing Jakob Andert and Dr.-Ing. Marco Günther
-
21 June 2016: Kick-off press statement released
Using Vehicle-to-X communication for more efficient hybrid propulsion: project funded by European Union and the state of NRW commences.